| Mesures de dťplacement sans contact |
1-1 Principe de mesures
La mesure de la rťluctance d'un circuit magnťtique permet de rťaliser des capteurs de dťplacement sans contact.
Ces capteurs peuvent mesurer la position de piŤces ferromagnťtiques (aciers ,fontes)ou de piŤces simplement
conductrices (alliages d'aluminium, alliages de cuivre).
C'est la proximitť de la piŤce ŗ mesurer, la variation de l'entrefer, qui modifie la rťluctance du circuit magnťtique.
Les variations de rťluctance sont mesurťes ŗ l'aide d'un ou deux bobinages montťs sur le circuit magnťtique.
L'utilisation de deux bobinages permet de realiser un capteur particuliŤrement peu sensible aux variations de resistance
des bobinages est des fils de liaisons (par exemple pour des applications de mesure sous trŤs hautes pressions).
L'utilisation d'une frťquence d'exitation basse(< 10 kHz) est prťfťrable pour mesurer les dťplacements ou la distance
d'une piŤce ferromagnťtique (capteurs inductifs).Une frťquence d'exitation plus ťlevťe (20 kHz ŗ 2 MHz) est utilisťe
pour mesurer des piŤces seulement conductrices (capteurs ŗ courants de Foucault).
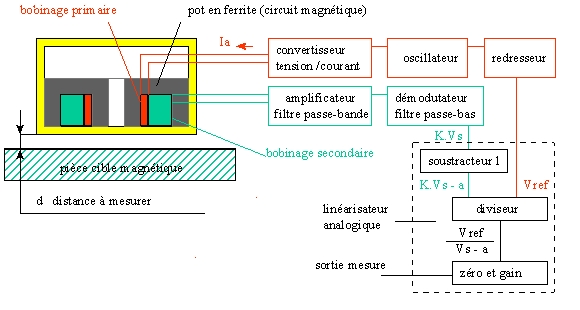
SchŤma d'un capteur ŗ variation de reluctance utilisant un transformateur et de son conditionneur.
Le conditionneur est composť par exemple d'un oscillateur, d'un convertisseur tension courant pour
l'alimentation du circuit primaire du capteur, d'un amplificateur de filtres et d'un dťmodulateur
pour mesurer la tension qui apparait aux bornes du circuit secondaire. A la suite de ces parties essentielles
du conditionneur on peut utiliser un linťarisateur analogique qui se sert de la modťlisation de la rťponse
hyperbolique du capteur. Une rťponse linťaire peut aussi Ítre obtenue en utilisant des tables de conversion mises
en mťmoire dans des PROM. Enfin si l'on dťsire mettre en mťmoire les signaux de plusieurs capteur sous forme numťrique
il peut Ítre plus ťconomique de les numťriser avant linťarisation et de convertir les tensions mesurťes en
dťplacement en utilisant les courbes d'ťtalonnage. Si de plus une mesure de tempťrature est associťe au capteur
il est possible d'effecter par calcul la compensation des dťrives qui leur sont dues.
Une licence de fabrication a ťtť cťdťe ŗ la sociťtť SENSOREX ZI de la Chatelaine ŗ Gaillard (74).
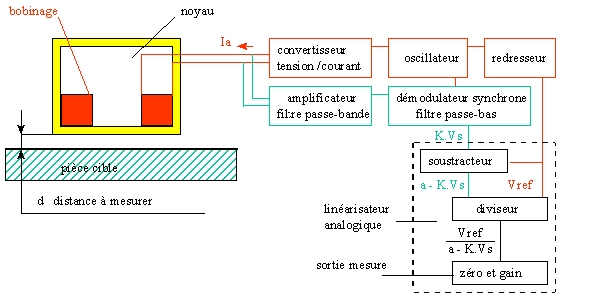
Schťma d'un capteur ŗ courants de Foucault utilisant un seul bobinage et de son conditionneur.
Dans cet exemple un seul bobinage a ťtť utilisť, il n'a pas ťtť utilisť de pot en ferrite pour concentrer les
ligne de champ, cela permet d'augmenter la portťe du capteur, par contre sa sensibilitť est diminuťe au courtes
distances. Ce capteur est beaucoup plus sensible ŗ l'influance de piťces mťtalique qui l'environne, le pot en
ferrite ne fait plus ťcran. Dans le conditionneur le dťmodulateur simple a ťtť remplacť par un dťmodulateur
synchrone afin de ne mesurer que le signal qui est proportionnel ŗ la partie rťactive de l'impťdance du capteur.
Cette sťparation n'est plus faite par le transformateur.
1-1 Les ťtendues de mesures vont du dixiŤme de millimŤtre ŗ quelques centimŤtres,elles sont fonction de
la taille et du mode de fonctionnement du capteur.
Lorsque le circuit magnťtique du capteur est composť d'un pot en ferrite, la distance de mesure optimale est
d = D/30 (D diamŤtre du pot en ferrite). L'ťtendue de mesure choisie est en gťnťral ťgale au double pour
obtenir de trŤs bonnes caractťristiques. Elle peut Ítre ťtendue ŗ 8 fois cette valeur, en acceptant de
perdre en linťaritť.
Si le capteur est rťalisť seulement avec des bobinages, il est possible d'obtenir des plus grandes
ťtendues de mesure (jusqu'a 5 centimŤtres pour des capteur ŗ courants de Foucault)
1-2 La justesse obtenue varie entre 1 et 0,1 % de l'ťtendue de mesure
La linťaritť de la rťponse est obtenue en linťarisant le signal fourni par le capteur.En premiŤre
approximation elle suit une loi hyperbolique.
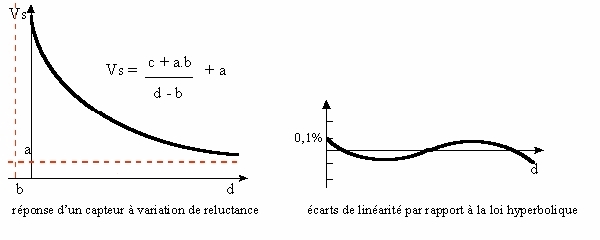
Rťponse d'un capteur ŗ variation de reluctance inductif. La reluctance du circuit magnťtique diminue
lorsque la piŤce ŗ mesurer se rapproche du capteur, la tension aux bornes du circuit secondaire augmente si le circuit primaire
est alimentť avec un courant de valeur efficace constante.
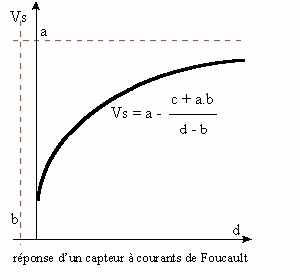
La reluctance du circuit magnťtique d'un capteur de dťplacement ŗ courants de Foucault
augmente lorsque la piŤce ŗ mesurer se rapproche du capteur, car ces courants qui se crťent en
surface de la piŤce ŗ mesurer, s'opposent au passage du flux magnťtique
la tension aux bornes du circuit secondaire diminue si le circuit primaire
est alimentť avec un courant de valeur efficace constante.
En linťarisant ŗ l'aide de l'ťquation hyperbolique, il est possible d'obtenir une erreur de linťaritť maximale
de 0,1 % pour une ťtendue de mesure de 1 mm, avec un pot en ferrite de diamŤtre 11 mm. Une difficultť majeure
si on veut faire des mesures de distance absolues est de dťfinir le point de rťfťrence ( le zťro ),
on se trouve souvant limitť par l'ťtat de surface des piŤces ŗ mesurer.
1-3 Stabilitť, dťrive(0,001%/įC de l'ťtendue de mesure)
La principale cause de dťrive du capteur est l'influence de la tempťrature. Elle augmente avec la frťquence du courant
d'alimentation du capteur.A une distance donnťe et pour une cible donnťe elle peut Ítre parfaitement compensťe( ŗ la
performance des moyens de contrŰle utilisťs, +/- 0,005 Ķm/įC).Pour une ťtendue
de mesure de 600 Ķm, une dťrive infťrieure ŗ 0,05 Ķm/įC peut Ítre obtenue.
Un bruit rťsiduel de 0,05 Ķm peut Ítre obtenu.
1-4 Les bandes passantes sont au mieux ťgales au tiers de la frťquence du courant d'alimentation du capteur (3 kHz
avec une porteuse de 10 kHz pour des capteurs inductifs,50 kHz avec une porteuse de 1 MHz pour des capteurs ŗ courants
de Foucault).
1-5 Applications
1-5-2 Mesure des contraintes dans les raccords de tuyau d'injecteur de moteur diesel
1-5-3 Mesure des contraintes dans les tiges de vannes
1-5-4 Mesure des efforts dans les paliers ŗ roulement ŗ billes
1-5-5 Mesure de la rectitude des rails