| Mesures de déplacement sans contact |
2-1 Introduction
La détermination des positions des points mesurés se fait par celle de l'intersection de deux faiseaux lumineux.
Les mesures dimensionelles par triangulation optique peuvent se faire de plusieurs façons différentes.
Soit en utilisant un éclairage structuré ou des points repérés directement sur la piéce et un système de prise de vue,soit
en utilisant deux ou plusieurs systèmes de prise de
vue qui permettent l'observation de la pièce à mesurer sous des angles différents.
L'éclairage structuré peut être réalisé soit à l'aide de faisceaux laser, soit par projection d'une mire.
Un laser permet de réaliser soit un éclairage ponctuel pour mesurer dans une direction,
soit une ligne pour mesurer dans un plan, soit plus
complètement un ensemble de points ou de lignes pour mesurer en 3 dimensions.
On peut aussi utiliser des trames projetées en lumière blanche.
Le système de prise de vue peut être une cellule à effet latéral (PSD) linéaire ou surfacique, un déteteur CCD linéaire ou surfacique,
un appareil photographique.
2-2 Le plus simple des capteurs, le capteur unidirectionel
2-2-1 Principe de mesure
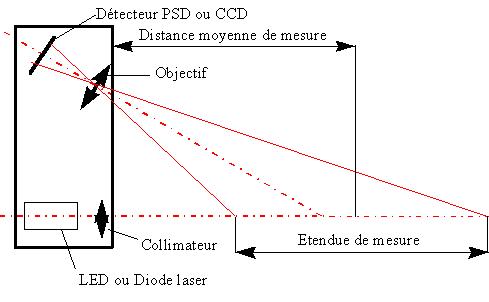
Schéma d'un capteur de déplacement par triangulation
Il est constitué principalement d'une diode laser ou electroluminescente (LED) et d'un collimateur qui crée un faisceau fin d'une part,
et d'un détecteur linéaire et d'un objectif d'autre part.Ces éléments sont regroupés dans un boitier métalique.Selon les fabrications,
l'ensemble de l'électronique de traitement peut aussi être regroupé dans le même boitier.
Le collimateur focalise le faiseau lumineux à la distance de mesure moyenne.l'objectif focalise l'image du point éclairé par le faiseau
lumineux sur le détecteur lineaire. La position de cette image sur le détecteur linéaire est fonction de la distance de la pièce à
mesurer.
2-2-2 Etendue et distance de mesure
La distance moyenne de mesure de ce type de capteur est fonction de la distance qui sépare l'émetteur du récepteur et de l'angle de
leur axe de visée.Elle varie entre quelques centimètres et plusieurs mètres.
Les étendues de mesure sont très variables, elles s'échelonnent de quelques dixièmes de millimètre jusqu'à plusieurs mètres.
2-2-3 Justesse de mesure
Le déplacement du point lumineux sur le détecteur n'est pas en genéral une fonction linéaire de la positon de la pièce à mesurer sauf
si on le positionne convenablement(voir schèma ci-après),le détecteur est incliné par rapport a l'axe optique, afin de rendre les
triangles objet et image semblable.
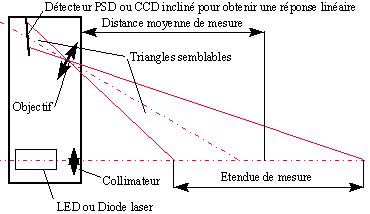
schèma d'un capteur linéaire
Les conditionneurs peuvent compenser les erreurs de linéarité, une justesse de 0,1 % de l'étendue de mesure est assez facilement
obtenue.Par contre il est pratiquement impossible d'obtenir une justesse de 0,01 % car les piéces mesurée ne diffusent pas la
lumière assez uniformément en raison de leur état de surface.De plus il y l'influence du speckle, le faisceau éclairant la pièce
à mesurer étant cohérant.Ici se trouvent les principales limitations des performances de la méthode de mesure.
Pour diminuer l'influence du speckle,
il faut augmenter l'ouverture de l'objectif de mesure. Pour diminuer l'influence des nonuniformité de surface, il faut soit utiliser
un faisceau d'éclairage trés fin et un détecteur de haute résolution, soit utiliser un faisceau d'éclairage assez gros pour moyenner
les irrégularités sur une surface suffisamment grande.
Des version simplifiées fonctionnent en détecteur, selon les modèles l'étendue de détection varie du centimètre à une quinzaine.
2-2-4 Stabilité
Ce sont les variations de température de la tête de mesure et du conditionneur qui peuvent provoquer des dérives.Elles provoquent
des déplacement relatifs des différents éléments optiques et de dérives des composants. Des valeurs de 0,02%/°C de l'étendue de
mesure sont courantes. Des compensations sont mises en oeuvre dans les capteurs de précision, des valeur de l'ordre de 0,003%/°C
sont réalisables.
2-2-5 Sortie des résultats des mesures
Pour la forme la plus simple, le capteur délivre un niveau logique indiquant qu'une pièce est détectée dans l'intervalle de
distance programmé.
Les capteurs mesurants délivrent selon les réalisations une tension analogique (0 à 10 V)proportionnelle à la distance mesurée
ou un courant (4-20 mA). Les conditioneurs plus complet comportent un affichage numérique,il peuvent de plus indiquer l'intensité
du signal lumineux recueilli, et posséder une sortie numérique (RS 232).
2-2-6 Limites d'utilisation
Les capteurs de déplacement par triangulation optique premettent d'effectuer des mesures dans des condition d'ambiance qui ne
sont pas trop contraignantes.La température du capteur est souvent limitée à une étendue de 0° à 50°C.
Les mesures se font généralement dans l'air.
Les mesures à travers une fenêtre sont possible à condition d'en tenir compte à l'étalonnage. Les projections d'eau ou d'huile sont
à éviter, elles perturbent les mesures. Par contre , il est posible de mesurer les déplacement d'une pièce placée dans un liquide
transparent mais il faut étalonner le capteur dans les conditions de mesure en raison de l'influence de la réfraction.
Les capteurs de déplacement par triangulation optique peuvent mesurer des pièce de nature très diverses à condition que leur surface
soit diffusante.Les surfaces optimales sont blanches et mates.Des problèmes de mesure peuvent de produire sur des surfaces métalliques
à faible rugosité car dans ce cas, la lumière diffusée vers le récepteur du capteur peut devenir trop faible.
La mesure n' en général pas possible sur des matériaux transparents. Avec précautions, des mesures sont réalisable sur des verres dépolis.
Des erreurs de décalage peuvent se produire lorsque l'on effecte des mesures sur des pièces translucides(alumine,matières plastiques).
Lorsque l'intensité de la lumière diffusée vers le détecteur du capteur diminuue, le bruit de mesure augmente,pour limiter ce probléme
dans certaine réalisation, il est réalisé un ajustement automatique de la puissance de la source lumineuse.
En cas de variation locale du coefficient de diffusion (transition noir-blanc) de la surface à mesurer, une augmentation de l'erreur de
mesure se produit. C'est une des principales cause de la limitation de la justesse de ce type de capteur.
Ce type de capteur peut être perturbé par la lumière ambiante ; des limites d'éclairement situées entre 2000 et 4000 lux sont courantes mais
des construtions spéciales permettent des mesures en plein soleil avec un éclairement de l'ordre de 1 million de lux.
Il faut bien veiller à ce que les points à mesurer soient visible de la source et du récepteur.La mesure au fond d'un trou profond n'est
souvent pas possible. Lorsque les pièces défilent devant le capteur il est préférable d'orienter le capteur perpendiculairement au sens
de déplacement, le point lumineux ne sera alors pas occulté au passage de marches.
Certains capteurs utilisent des sources lumineuses laser de puissance assez importante (classe III par exemple), des précaution d'emploi
sont donc à prendre pour préserver la sécurité du personnel.
2-3 La mesure bidimensionnelle, le relevé de profil
Plusieurs modes de réalisation sont possibles, suivant la geométrie de mesure
utilisée, le type de détecteur et le mode d'éclairage.
2-3-1 La méthode la plus simple
La mesure d'un profil peut être obtenue en déplaçant un capteur unidimensionnel
soit par une rotation autour d'un axe, soit par translation. On peut aussi
placer un miroir devant un capteur unidimensionnel.
2-3-2 Le faisceau d'éclairage est dévié dans le plan de triangulation
Pour dévier le faisceau lumineux ,il est possible d'utiliser un miroir monté
sur un galvanomètre ou un axe de codeur angulaire.Un déviateur acousto-optique
peut aussi être utilisé. La modulation de la puissance lumineuse peut être
réalisée si nécésaire par la diode laser ou par le dispositif de déviation
acouto-optique.Un détecteur linéaire est en général utilisé, suivant les performances
souhaitées on peut utiliser un détecteur PSD ou CCD.La mesure est séquentielle sur
la ligne de mesure.
Pour réaliser des mesures à l'aide de cette methode il faut contrôler précisement
l'angle de déflexion du faisceau lumineux
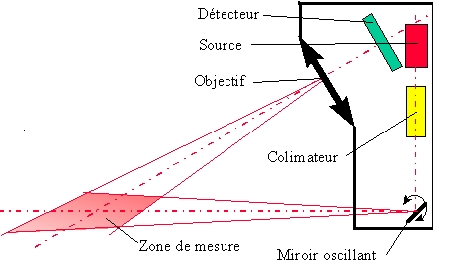
Schéma d'un système de mesure bidimensionel, la ligne de mesure est dans le
plan de triangulation.
2-3-3 Le faisceau d'éclairage est dévié dans le plan perpendiculaire au plan
de triangulation
Pour réaliser le plan lumineux, il est possible d'utiliser une diode ou un tube laser et
des lentilles,un réseau holographique, un miroir tournant, ou un déviateur
acousto-optique. En lumière blanche le plan lumineux peut être obtenu à
l'aide d'une lampe halogène et d'une fente. On peut aussi choisir d'éclairer
un demi plan en utilisant un couteau. Un détecteur CCD matriciel est le
plus habituellement utilisé. Si le plan lumineux est obtenu par balayage un
détecteur PSD bidimensionnel est utilisable.
L'avantage de méthode est qu'elle ne nécéssite pas la détermination de l'angle
de déviation du faisceau lumineux, seul la direction du plan lumineux est utilisé
pour la triangulation.
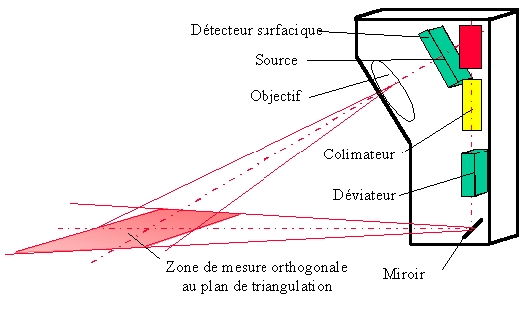
Schéma d'un système de mesure bidimensionel, la ligne de mesure est dans le
plan perpendiculaire au plan de triangulation.
2-3-4 Applications possible
En utilisant trois systémes de mesures placés à 120° il est possible de
controler la forme extérieure de joints à la sortie d'extrudeuse,de profilé
en sortie de laminoir(à chaud ou à froid),de reconnaître et de mesurer la
position d'une voie ferrée sitée à coté d'une autre.
2-4 La mesure tridimensionnelle par triangulation optique
2-4-1 Principes
Premièrement la mesure tridimensionnelle peut être réalisée en déplaçant un capteur déplacement
unidimensionnel par triangulation optique selon deux axes de translation, comme
dans une machine à mesurer classique. Il est possible aussi de combiner un axe
de rotation sur lequel la piéce à mesurer est placée et déplacer la capteur de
mesure sans contact sur un axe de déplacement linéaire parallèle à l'axe de
rotation de la pièce,cela permet d'en contrôler une plus grande partie.
Deuxièment le relevé tridimensionnel peut être effectué en déplaçant la pièce par translation
ou rotation devant un système de mesure bidimensionnel selon sa forme.On peut
évidemment aussi déplacer un système de mesure bidimensionnel selon un axe de
rotation ou de translation.
La troisième méthode consiste à associer un éclairage bidimensionnel est un détecteur
lui aussi bidimensionnel.
Il y a de nombreuses solution pour réaliser un éclairage structuré bidimensionnel.
Il est possible de déplacer un faisceau laser à l'aide de deux miroirs aux axes
de rotation orthogonaux(avec des gonimètres ou des galvanomètes), ou à l'aide
d'un seul miroir monté sur un goniomètre possédant deux axes de rotation.
Une autre méthode pour réaliser cet éclairage est de déplacer un plan lumineux
avec un miroir rotatif.
Le moyen le plus souple utilise deux déviateurs acousto-optiques croisés,dans
ce cas n'importe quelle forme d'éclairage peut être réalisé. Il est possible
de passer d'une direction à une autre en 50 µs, pendant une prise d'image de
40 ms, 500 points différents peuvent être éclairés tout en modulant l'intensité
lumineuse en fonction de l'état de surface de la pièce à contrôler.